1. Tujuan Perancangan (DAFTAR ISI)
Tujuan perancangan smart green house ini adalah agar mempermudah pemilik dalam pengukuran suhu ruangan agar tanaman dapat terjaga dengan baik.
2.
Komponen (DAFTAR ISI)
a.

b.

c.

d.
Sensor
PIR

e.
Motor
Servo

f.

g.

h.

i.

j.

k.
Kipas
DC

l.

m.
Breadboard

n.

o. Potensiometer

p.
Kabel
USB

3. Dasar Teori (DAFTAR ISI)
a.
Komunikasi UART
UART atau Universal
Asynchronous Receiver-Transmitter adalah bagian perangkat keras komputer yang
menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya
berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada
komputer atau port serial perangkat periperal. UART sekarang ini termasuk di
dalam beberapa mikrokontroler, contohnya PIC16F628.
UART (Universal
Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang
menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya
berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada
komputer atau port serial perangkat periperal.
Gambar 1. UART
Data dikirimkan secara paralel dari data bus ke UART1. Pada
UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam
satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx
UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di
transfer secara parallel ke data bus penerima.
b.
Arduino Uno
Arduino adalah kit elektronik atau
papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama
yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel.
Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang
menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa
menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer
ataupun perangkat lain.

Gambar 2. Arduino
Adapun spesifikasi dari Arduino Uno ini adalah sebagai
berikut :

Bagian-bagian Arduino UNO :
1. Power USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
2. Power Jack
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 – 12 V.
3. Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
4. Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
5. Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika (0 atau 1). Pin berlabel " ~ " adalah pin-pin PWM (Pulse Width Modulation) yang dapat digunakan untuk menghasilkan PWM.
6. Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
c.
Sensor Soil Moisture

Gambar 3. Sensor SoilMoisture
Soil Moisture Sensor merupakan suatu modul yang berfungsi
untuk mendeteksi tingkat kelembapan tanah menggunakan mikrokontroler seperti
arduino. Sensor kelembapan tanah ini dapat dimanfaatkan pada sistem pertanian,
perkebunan, maupun sistem hidroponik menggunakan hidroton.
Cara penggunaan modul ini cukup mudah, yakni dengan
memasukkan sensor ke dalam tanah dan setting potensiometer untuk mengatur
sensitifitas dari sensor. Keluaran dari sensor akan bernilai 1 / 0 ketika
kelembapan tanah menjadi tinggi/ rendah yang dapat di treshold dengan
potensiometer.
Spesifikasi dari sensor ini adalah :
1.
Comparator menggunakan LM393
2.
Hanya menggunakan 2 plat kecil sebagai sensor
3.
Supply Tegangan 3.3-5 VDC
4.
Digital output D0 dapat secara langsung dikoneksikan dengan MCU
dengan mudah
d.
Sensor DHT11
Sensor DHT11 adalah module sensor yang berfungsi untuk
mendeteksi suhu dan kelembaban yang memiliki output tegangan analog yang dapat
diolah lebih lanjut menggunakan mikrokontroler. Module sensor ini tergolong
kedalam elemen resistif seperti perangkat pengukur suhu seperti contohnya yaitu
NTC.
Kelebihan dari module sensor ini dibanding module sensor
lainnya yaitu dari segikualitas pembacaan data sensing yang lebih responsif
yang memliki kecepatan dalam hal sensing objek suhu dan kelembaban, dan data
yang terbaca tidak mudah terinterverensi. Sensor DHT11 pada umumya memiliki
fitur kalibrasi nilai pembacaan suhu dan kelembaban yang cukup akurat.
Penyimpanan data kalibrasi tersebut terdapat pada memori
program OTP yang disebut juga dengan nama koefisien kalibrasi.Sensor ini
memiliki 4 kaki pin, dan terdapat juga sensor DHT11 dengan breakout PCB yang
terdapat hanya memilik 3 kaki pin seperti gambar dibawah ini.

Gambar 4. Sensor DHT 11
e.
Sensor PIR

Gambar 5. Sensor PIR
Sensor PIR (Passive Infrared Receiver) adalah sebuah sensor
yang biasa digunakan untuk mendeteksi keberadaan manusia. Aplikasi ini biasa
digunakan untuk system alarm pada rumah-rumah atau perkantoran. Sensor PIR
adalah sebuah sensor yang menangkap pancaran sinyal inframerah yang dikeluarkan
oleh tubuh manusia maupun hewan. Sensor PIR dapat merespon perubahan- perubahan
pancaran sinyal inframerah yang dipancarkan oleh tubuh manusia.
Sensor PIR ini terdapat bagian-bagian yang mempunyai perannya masing-masing,
yaitu Fresnel Lens, IR Filter, Pyroelectric sensor, amplifier, dan comparator.
Bagian PIR Sensor
a)
Fresnel Lens
Fresnel Lens untuk memfokuskan
sinar terang, tetapi juga karena intensitas cahaya yang relatif konstan di seluruh lebar berkas
cahaya
b) IR Filter
IR Filter di modul sensor PIR ini
mampu menyaring panjang gelombang sinar infrared pasif antara 8 sampai 14
mikrometer, sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang
berkisar antara 9 sampai 10 mikrometer ini saja yang dapat dideteksi oleh
sensor. Sehingga Sensor PIR hanya bereaksi pada tubuh manusia saja.
c) Pyroelectric sensor
Seperti tubuh manusia yang memiliki suhu tubuh kira-kira 320
C, yang merupakan suhu panas yang khas yang terdapat pada lingkungan. Pancaran
sinar inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang
merupakan inti dari sensor PIR.
d) Amplifier
Sebuah sirkuit amplifier yang ada menguatkan arus yang
masuk pada material pyroelectric.
e) Komparator
Setelah dikuatkan oleh amplifier kemudian arus dibandingkan
oleh komparator sehingga menghasilkan output.
Berikut ini adalah Karakteristik dari sensor PIR :
1. Tegangan operasi 4.7 - 5 Volt
2. Arus standby (tanpa beban) 300 μA
3. Suhu kerja antara -20 oC - 50 oC
4. Jangkauan deteksi 5 meter
5. Kecepatan deteksi 0.5 detik

Gambar 6. Grafik Pir terhadap arah , jarak, dan kecepatan
Pada grafik tersebut ; (a) Arah yang berbeda mengasilkan
tegangan yang bermuatan berbeda ; (b) Semakin dekat jarak objek terhadap sensor
PIR, maka semakin besar tegangan output yang dihasilkan ; (c) Semakin cepat
objek bergerak, maka semakin cepat terdeteksi oleh sensor PIR karena infrared
yang ditimbulkan dengan lebih cepat oleh objek semakin mudah dideteksi oleh
PIR, namun semakin sedikit juga waktu yang dibutuhkan karena sudah diluar
jangkauan sensor PIR.
f.
Motor Servo

Gambar 7. f. Motor
Servo
Motor
servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan
sudut pergerakan rotornya dapat dikendalikan dengan memberikan variasi lebar
pulsa (duty cycle) sinyal PWM pada bagian pin kontrolnya.
Spesifikasinya kurang lebih sebagai berikut :
tegangan kerja : 4,8 – 6 Vdc
torsi : 1,6 kg/cm
arus : < 500 mA
dimensi : 22 x 12,5 x 29,5 cm
berat : 9 gr
kecepatan putaran: 0,12 detik/60 derajat
Konfigurasi Pin :


g.
LCD

Gambar 8. LCD
LCD atau Liquid Crystal Display merupakan suatu peralatan
elektronika yang berfungsi untuk menampilkan output dari suatu sistem dengan
cara membentuk suatu citra atau gambaran pada layar. Sebuah citra dibentuk
dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun
layar sebuah LCD.
LCD terdiri atas dua bagian utama yaitu bagian Backlight
(Lampu Latar Belakang) dan bagian Liquid Crystal (Kristal Cair). LCD tidak
memancarkan pencahayaan apapun, tetapi hanya merefleksikan dan mentransmisikan
cahaya yang melewatinya. Oleh karena itu, LCD memerlukan Backlight atau Cahaya
latar belakang untuk sumber cahayanya. Cahaya Backlight tersebut pada umumnya
adalah berwarna putih. Sedangkan Kristal Cair (Liquid Crystal) adalah cairan
organik yang berada diantara dua lembar kaca yang memiliki permukaan transparan
yang konduktif.
Keterangan:
1
Film dengan polarizing filter vertical untuk memolarisasi
cahaya yang masuk.
2
Glass substrate yang berisi kolom-kolom elektroda Indium
tinoxide (ITO).
3
Twisted nematic liquid crystal (kristal cair dengan susunan
terpilin).
4
Glass substrate yang berisibaris-baris elektroda Indium
tinoxide (ITO).
5
Film dengan polarizing filter horizontal untuk memolarisasi
cahaya yang masuk.
6
Reflektor cahaya untuk memantulkan cahaya yang masuk LCD
kembali ke pengamat.
Umumnya LCD sudah memiliki integrated circuit tersendiri
sehingga para pengguna dapat mengontrol tampilan LCD dengan mudah menggunakan
mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah
tersedia.


h.
Buzzer

Gambar 9.Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi
untuk mengubah getaran listrik menjadi getaran suara getaran listrik menjadi
getaran suara.
Pada dasarnya prinsip kerja buzzer hampir sama dengan loudspeaker,
jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan
kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet,
kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan
polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap
gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga
membuat udara bergetar yang akan menghasilkan suara.
Buzzer biasa digunakan sebagai indikator bahwa proses telah
selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).
i.
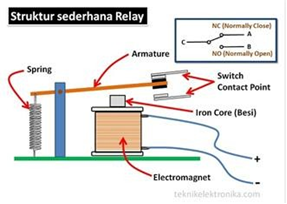
Relay

Gambar 10. Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik
dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2
bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak
Saklar/Switch).
Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan
Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat
menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan
Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature
Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.
j.
Pompa Air

Gambar 11.Pompa Air
Pompa Air DC merupakan jenis pompa yang menggunakan motor dc
dan tegangan searah sebagai sumber tenaganya[8]. Dengan memberikan beda
tegangan pada kedua terminal tersebut, motor akan berputar pada satu arah, dan
bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan
terbalik pula. Polaritas dari tegangan yang diberikan pada dua terminal
menentukan arah putaran motor, sedangkan besar dari beda tegangan pada kedua
terminal menentukan kecepatan motor.
Pompa Air DC memiliki 3 bagian dasar :
1.
Bagian yang tetap/stasioner yang disebut stator. Stator ini
menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil (elektro
magnet) ataupun magnet permanen.
2.
Bagian yang berputar disebut rotor. Rotor ini berupa sebuah
koil dimana arus listrik mengalir.
3.
Gear Box yang dipasang pada pompa. Gear box ini didalamnya
terdapat gear yang dipasang pada ujung rotor untuk menghisap air.Gaya
elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar
yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh
megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet
dari kutub utara ke kutub selatan.
k.
Kipas DC
Rangkaian kontrol fan kipas 5 volt dc ini berfungsi untuk
mengendalikan kecepatan putaran motor dc 5 volt. Pengertian motor dc dan
prinsip kerjanya motor listrik dc atau dc motor adalah suatu perangkat yang
mengubah energi listrik menjadi energi kinetik atau gerakan motion motor dc ini
juga dapat disebut sebagai motor arus searah. Motor dc atau motor arus searah
sebagaimana namanya menggunakan arus langsung dan tidak langsung direct
unidirectional

Gambar 12. Kipas
l.
Resistor
Resistor merupakan komponen penting
dan sering dijumpai dalam sirkuit Elektronik. Boleh dikatakan hampir setiap
sirkuit Elektronik pasti ada Resistor. Tetapi banyak diantara kita yang bekerja
di perusahaan perakitan Elektronik maupun yang menggunakan peralatan Elektronik
tersebut tidak mengetahui cara membaca kode warna ataupun kode angka yang ada
ditubuh Resistor itu sendiri. Seperti yang dikatakan sebelumnya, nilai
Resistor yang berbentuk Axial adalah diwakili oleh Warna-warna yang terdapat di
tubuh (body) Resistor itu sendiri dalam bentuk Gelang. Umumnya terdapat 4
Gelang di tubuh Resistor, tetapi ada juga yang 5 Gelang. Gelang warna Emas
dan Perak biasanya terletak agak jauh dari gelang warna lainnya sebagai tanda
gelang terakhir. Gelang Terakhirnya ini juga merupakan nilai toleransi pada
nilai Resistor yang bersangkutan. Tabel dibawah ini adalah warna-warna
yang terdapat di Tubuh Resistor:

Gambar 13. Resistor

Tabel Kode Warna ResistorPerhitungan untuk Resistor dengan 4
Gelang warna :

Cara menghitung nilai resistor 4 gelang Masukkan angka
langsung dari kode warna Gelang ke-1 (pertama) Masukkan angka langsung
dari kode warna Gelang ke-2 Masukkan Jumlah nol dari kode warna Gelang
ke-3 atau pangkatkan angka tersebut dengan 10 (10n) Merupakan Toleransi
dari nilai Resistor tersebut .
m.
LED

LED adalah suatu semikonduktor yang memancarkan cahaya, LED
mempunyai kecenderungan polarisasi.
LED mempunyai kutub positif
dan negatif
(p-n) dan hanya akan menyala bila diberikan arus maju. Ini dikarenakan LED
terbuat dari bahan semikonduktor yang hanya akan mengizinkan arus listrik
mengalir ke satu arah dan tidak ke arah sebaliknya. Bila LED diberikan arus
terbalik, hanya akan ada sedikit arus yang melewati LED. Ini menyebabkan LED
tidak akan mengeluarkan emisi cahaya.
Prinsip Kerja LED:
Karena LED adalah salah satu jenis dioda maka LED memiliki 2
kutub yaitu anoda dan katoda. Dalam hal ini LED akan menyala bila ada arus
listrik mengalir dari anoda menuju katoda. Pemasangan kutub LED tidak boleh
terebalik karena apabila terbalik kutubnya maka LED tersebut tidak akan
menyala. Led memiliki karakteristik berbeda-beda menurut warna yang dihasilkan.
Semakin tinggi arus yang mengalir pada led maka semakin terang pula cahaya yang
dihasilkan, namun perlu diperhatikan bahwa besarnya arus yang diperbolehkan
10mA- 20mA dan pada tegangan 1,6V – 3,5 V menurut karakter warna yang
dihasilkan. Apabila arus yang mengalir lebih dari 20mA maka led akan terbakar.
Untuk menjaga agar LED tidak terbakar perlu kita gunakan resistor sebagai
penghambat arus.
n.
Potensiometer

Gambar 15. Potensiometer
Potensiometer adalah salah satu jenis Resistor yang Nilai
Resistansinya dapat diatur sesuai dengan kebutuhan Rangkaian Elektronika
ataupun kebutuhan pemakainya. Potensiometer merupakan Keluarga Resistor yang
tergolong dalam Kategori Variable Resistor. Secara struktur, Potensiometer
terdiri dari 3 kaki Terminal dengan sebuah shaft atau tuas yang berfungsi
sebagai pengaturnya. Gambar dibawah ini menunjukan Struktur Internal
Potensiometer beserta bentuk dan Simbolnya.
Pada dasarnya bagian-bagian penting dalam Komponen
Potensiometer adalah:
· Penyapu atau disebut juga
dengan Wiper
· Element Resistif
· Terminal
Berdasarkan bentuknya, Potensiometer dapat dibagi menjadi 3
macam, yaitu:
Potensiometer Slider, yaitu Potensiometer yang nilai
resistansinya dapat diatur dengan cara menggeserkan Wiper-nya dari kiri ke
kanan atau dari bawah ke atas sesuai dengan pemasangannya. Biasanya menggunakan
Ibu Jari untuk menggeser wiper-nya
Potensiometer Rotary, yaitu Potensiometer yang nilai resistansinya
dapat diatur dengan cara memutarkan Wiper-nya sepanjang lintasan yang
melingkar. Biasanya menggunakan Ibu Jari untuk memutar wiper tersebut. Oleh
karena itu, Potensiometer Rotary sering disebut juga dengan Thumbwheel
Potentiometer.
Potensiometer Trimmer, yaitu Potensiometer yang bentuknya
kecil dan harus menggunakan alat khusus seperti Obeng (screwdriver) untuk
memutarnya. Potensiometer Trimmer ini biasanya dipasangkan di PCB dan jarang
dilakukan pengaturannya.
Sebuah Potensiometer (POT) terdiri dari sebuah elemen
resistif yang membentuk jalur (track) dengan terminal di kedua ujungnya.
Sedangkan terminal lainnya (biasanya berada di tengah) adalah Penyapu (Wiper)
yang dipergunakan untuk menentukan pergerakan pada jalur elemen resistif
(Resistive). Pergerakan Penyapu (Wiper) pada Jalur Elemen Resistif inilah yang
mengatur naik-turunnya Nilai Resistansi sebuah Potensiometer.
Elemen Resistif pada Potensiometer umumnya terbuat dari bahan
campuran Metal (logam) dan Keramik ataupun Bahan Karbon (Carbon). Berdasarkan
Track (jalur) elemen resistif-nya, Potensiometer dapat digolongkan menjadi 2
jenis yaitu Potensiometer Linear (Linear Potentiometer) dan Potensiometer
Logaritmik (Logarithmic Potentiometer).
Dengan kemampuan yang dapat mengubah resistansi atau
hambatan, Potensiometer sering digunakan dalam rangkaian atau peralatan
Elektronika dengan fungsi-fungsi sebagai berikut: ·
· Sebagai pengatur Volume pada
berbagai peralatan Audio/Video seperti Amplifier, Tape Mobil, DVD Player.
· Sebagai Pengatur Tegangan
pada Rangkaian Power Supply
· Sebagai Pembagi Tegangan
Aplikasi Switch TRIAC
· Digunakan sebagai Joystick
pada Tranduser
· Sebagai Pengendali Level
Sinyal
4. Listing
Program (DAFTAR ISI)
1) Master
#include <DHT.h>
#include <DHT_U.h>
#include
<LiquidCrystal.h>
#include <Servo.h>
#define DHTPIN 6
#define DHTTYPE DHT11
DHT dht(DHTPIN, DHTTYPE);
#define SOIL A1 // deklarasi sensor soil di pin analog 1
#define PIR 7 // deklarasi
sensor pir di pin DIGITAL 5
LiquidCrystal lcd(8, 9, 10,
11, 12, 13);
Servo myservo;
int nilaiSOIL;
int LED[] = {2, 3, 4};
int pinPIR = 7;
int statusPIR;
int pintu = 5;
int pos = 0;
void setup()
{
pinMode(6, INPUT);
pinMode(A1, INPUT);
pinMode(5, OUTPUT );
pinMode(pinPIR, INPUT);
lcd.begin(16, 2);
for (int i = 0; i <= 3; i++) {
pinMode (LED[i], OUTPUT);
}
Serial.begin(9600);
dht.begin();
myservo.attach(5);
}
void loop()
{
float nilaiSuhu = dht.readTemperature()
;
nilaiSOIL = analogRead(SOIL);
if (nilaiSuhu > 0 && nilaiSuhu
< 25)
{
nilaiSOIL = analogRead(SOIL);
if ( nilaiSOIL >= 600 &&
nilaiSOIL <= 700) {
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
Serial.print("1");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Suhu : ");
lcd.setCursor(8, 0);
lcd.print(nilaiSuhu);
lcd.setCursor(0, 1);
lcd.print("Kondisi : Normal");
delay(1000);
lcd. setCursor(10,1);
delay(3000);
}
else if (nilaiSOIL > 700) {
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
Serial.print("2");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Suhu : ");
lcd.setCursor(8, 0);
lcd.print(nilaiSuhu);
lcd.setCursor(0, 1);
lcd.print("Kondisi : Kering");
delay(500);
lcd. setCursor(10,1);
delay(3000);
}
else if (nilaiSOIL < 600) {
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
Serial.print("3");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Suhu : ");
lcd.setCursor(8, 0);
lcd.print(nilaiSuhu);
lcd.setCursor(0, 1);
lcd.print("Kondisi : Basah");
delay(500);
lcd. setCursor(10,1);
delay(3000);
}
}
else if (nilaiSuhu > 24 &&
nilaiSuhu < 31)
{
nilaiSOIL = analogRead(SOIL);
if ( nilaiSOIL >= 600 &&
nilaiSOIL <= 700) {
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
Serial.print("4");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Suhu : ");
lcd.setCursor(8, 0);
lcd.print(nilaiSuhu);
lcd.setCursor(0, 1);
lcd.print("Kondisi : Normal");
delay(500);
lcd. setCursor(10,1);
delay(3000);
}
else if (nilaiSOIL > 700) {
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
Serial.print("5");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Suhu : ");
lcd.setCursor(8, 0);
lcd.print(nilaiSuhu);
lcd.setCursor(0, 1);
lcd.print("Kondisi : Kering");
delay(500);
lcd. setCursor(10,1);
delay(3000);
}
else if (nilaiSOIL < 600){
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
Serial.print("6");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Suhu : ");
lcd.setCursor(8, 0);
lcd.print(nilaiSuhu);
lcd.setCursor(0, 1);
lcd.print("Kondisi : Basah");
delay(500);
lcd. setCursor(10,1);
delay(3000);
}
}
else if (nilaiSuhu >= 31) {
nilaiSOIL = analogRead(SOIL);
if ( nilaiSOIL >= 600 &&
nilaiSOIL <= 700) {
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
Serial.print("7");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Suhu : ");
lcd.setCursor(8, 0);
lcd.print(nilaiSuhu);
lcd.setCursor(0, 1);
lcd.print("Kondisi : Normal");
delay(500);
lcd. setCursor(10,1);
delay(3000);
}
else if (nilaiSOIL > 700) {
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
Serial.print("8");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Suhu : ");
lcd.setCursor(8, 0);
lcd.print(nilaiSuhu);
lcd.setCursor(0, 1);
lcd.print("Kondisi : Kering");
delay(500);
lcd. setCursor(10,1);
delay(3000);
}
else if (nilaiSOIL < 600){
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
Serial.print("9");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Suhu : ");
lcd.setCursor(8, 0);
lcd.print(nilaiSuhu);
lcd.setCursor(0, 1);
lcd.print("Kondisi : Basah");
delay(500);
lcd. setCursor(10,1);
delay(3000);
}
}
{
statusPIR =
digitalRead(pinPIR);
if (statusPIR == 1) {
digitalWrite(pinPIR, HIGH);
digitalWrite(5, HIGH);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print(" WELCOME
");
lcd.setCursor(0, 1);
lcd.print("SELAMAT DATANG");
for (pos = 0; pos <= 180; pos += 1) {
myservo.write(pos);
delay(15);
}
for (pos = 180; pos >= 0; pos -= 1) {
myservo.write(pos);
delay(15);
}
delay(100);
}
else if(statusPIR == 0) {
digitalWrite(pinPIR,
LOW);
digitalWrite(5, LOW);
delay(1000);
}
}
}
2) Slave
//Slave
#define buzzer 8
const int relay1 = 7; //KIPAS
const int relay2 = 6; //POMPA
AIR
int relayON = HIGH; //relay
nyala
int relayOFF = LOW; //relay
mati
int LED = 2;
void setup()
{
pinMode(relay1, OUTPUT);
pinMode(relay2, OUTPUT);
pinMode(LED, OUTPUT);
pinMode(buzzer, OUTPUT);
Serial.begin(9600);
}
void loop()
{
int data = Serial.read();
if(data == '1')
{
Serial.println("1") ;
digitalWrite(relay1, relayOFF);
digitalWrite(relay2, relayOFF);
digitalWrite(LED, HIGH);
digitalWrite(buzzer, LOW);
}
else if(data == '2')
{
Serial.println("2") ;
digitalWrite(relay1, relayOFF);
digitalWrite(relay2, relayON);
digitalWrite(LED, HIGH);
digitalWrite(buzzer, HIGH);
}
else if(data == '3')
{
Serial.println("3") ;
digitalWrite(relay1, relayOFF);
digitalWrite(relay2, relayOFF);
digitalWrite(LED, HIGH);
digitalWrite(buzzer, LOW);
}
else if(data == '4')
{
Serial.println("4") ;
digitalWrite(relay1, relayOFF);
digitalWrite(relay2, relayOFF);
digitalWrite(LED, LOW);
digitalWrite(buzzer, LOW);
}
else if(data == '5')
{
Serial.println("5") ;
digitalWrite(relay1, relayOFF);
digitalWrite(relay2, relayON);
digitalWrite(LED, LOW);
digitalWrite(buzzer, LOW);
}
else if(data == '6')
{
Serial.println("6") ;
digitalWrite(relay1, relayOFF);
digitalWrite(relay2, relayOFF);
digitalWrite(LED, LOW);
digitalWrite(buzzer, LOW);
}
else if(data == '7')
{
Serial.println("7") ;
digitalWrite(relay1, relayON);
digitalWrite(relay2, relayOFF);
digitalWrite(LED, LOW);
digitalWrite(buzzer, LOW);
}
else if(data == '8')
{
Serial.println("8") ;
digitalWrite(relay1, relayON);
digitalWrite(relay2, relayON);
digitalWrite(LED, LOW);
digitalWrite(buzzer, HIGH);
}
else if(data == '9')
{
Serial.println("9") ;
digitalWrite(relay1, relayON);
digitalWrite(relay2, relayOFF);
digitalWrite(LED, LOW);
digitalWrite(buzzer, LOW);
}
}
6. 6. Rangkaian Simulasi (DAFTAR ISI)

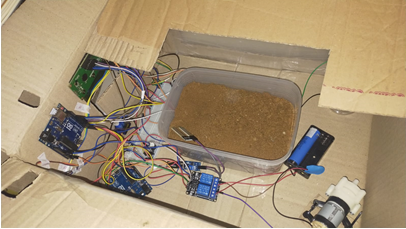
7. 7. Hardware dan Video (DAFTAR ISI)
1)
Hardware
2)
Video
8. 8. Analisis (DAFTAR ISI)
Output : Motor Servo SG90, Kipas serta pompa air
Sensor PIR berperan sebagai pendeteksi adanya manusia dimana sensor PIR dihubungkan ke motor servo SG90 yang nantinya akan membuka dan menutup pintu secara otomatis jika terdeteksi adanya manusia. Sensor DHT11 berperan untuk mendeteksi suhu sekitar tanah yang nanti nya akan di hubungkan ke LED sebagai indikator suhu, serta sensor soilmoisture yang berfungsi untuk mendeteksi kelembaban. Pada sensor DHT 11 terdapat 3 buah kondisi yang dapat dilihat pada indikator suhu yang berupa LED dimana ada suhu rendah, suhu normal dan suhu tinggi. Kemudian untuk nilai suhu akan ditampilkan di LCD. Untuk sensor kelembaban akan digunakan sebagai penentu motor akan menyiram atau tidak, output nya akan diarahkan ke pompa dan kipas serta sebuah LED sebagai Pemanas ruangan ketika suhu rendah atau dingin. Sensor soilmoisture juga memiliki 3 keadaan saat sensor bekerja, ketika terkena air maka tidak akan mengeluarkan tegangan dan jika kering akan mengeluarkan tegangan. Itu artinya jika kondisi basah maka tegangan rendah (0-600) sehingga motor tidak akan bergerak, sementara jika 600-800 itu tergolong normal dan kelembaban nya pas akan tetapi motor tidak akan bergerak dan jika diatas 800 itu tergolong kering dan motor akan bergerak. Pada LCD akan ditampilkan keadaan kelembaban pada baris kedua dibawah penampilan nilai suhu. ketika kelembaban nya kering motor bergerak menandakan bahwa tanaman sedang disiram . Lalu apabila suhu rendah atau dingin, maka sinyal dikirim dari master ke slave sebagai indikator dan membuat LED menyala sebagai pemanas ruangan. Apabila suhu sudah normal maka LED akan mati. Lalu apabila suhu tinggi atau panas, maka sinyal dikirim dari master ke slave sebagai indikator dan membuat motor DC (kipas) menyala sebagai pendingin ruangan. Apabila suhu sudah normal maka motor DC akan mati. Selain itu juga terdapat buzzer yang akan hidup apabila suhu sangat tinggi dan kondisi kelembaban kering.
9. 9. Kesimpulan (DAFTAR ISI)
Berdasarkan percobaan yang telah dilakukan maka didapatkan kesimpulan bahwa dengan menggunakan Sensor PIR, Sensor SoilMoisture dan Sensor DHT11 serta arduino dan komponen pendukung lainnya melalui komunikasi UART yang merupakan komunikasi .
10 10. Link
Download (DAFTAR ISI)


Tidak ada komentar:
Posting Komentar